第一部分 力&物體的平衡
第一講 力的處理
一、矢量的運(yùn)算
1�、加法
表達(dá): +
+  =
=  �����。
�����。
名詞: 為“和矢量”���。
為“和矢量”���。
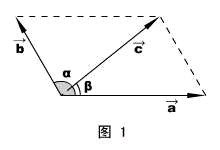
法則:平行四邊形法則。如圖1所示�����。
和矢量大���。篶 =  ���,其中α為
���,其中α為 和
和 的夾角���。
的夾角���。
和矢量方向: 在
在 、
、 之間�,和
之間�,和 夾角β= arcsin
夾角β= arcsin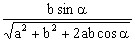
2、減法
表達(dá): =
=  -
- ����。
����。
名詞: 為“被減數(shù)矢量”,
為“被減數(shù)矢量”, 為“減數(shù)矢量”���,
為“減數(shù)矢量”���, 為“差矢量”����。
為“差矢量”����。
法則:三角形法則�。如圖2所示。將被減數(shù)矢量和減數(shù)矢量的起始端平移到一點(diǎn)����,然后連接兩時(shí)量末端,指向被減數(shù)時(shí)量的時(shí)量����,即是差矢量。
差矢量大��。篴 =  ���,其中θ為
���,其中θ為 和
和 的夾角。
的夾角。
差矢量的方向可以用正弦定理求得�����。
一條直線上的矢量運(yùn)算是平行四邊形和三角形法則的特例��。
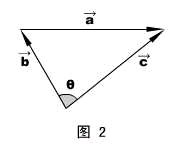
例題:已知質(zhì)點(diǎn)做勻速率圓周運(yùn)動(dòng)�,半徑為R ,周期為T(mén) ����,求它在 T內(nèi)和在
T內(nèi)和在 T內(nèi)的平均加速度大小。
T內(nèi)的平均加速度大小。
解說(shuō):如圖3所示�����,A到B點(diǎn)對(duì)應(yīng) T的過(guò)程���,A到C點(diǎn)對(duì)應(yīng)
T的過(guò)程���,A到C點(diǎn)對(duì)應(yīng) T的過(guò)程�����。這三點(diǎn)的速度矢量分別設(shè)為
T的過(guò)程�����。這三點(diǎn)的速度矢量分別設(shè)為 ����、
����、 和
和 ���。
���。
根據(jù)加速度的定義  =
=  得:
得: =
=  �,
�, =
= 
由于有兩處涉及矢量減法�,設(shè)兩個(gè)差矢量  =
=  -
- ,
, =
=  -
- �,根據(jù)三角形法則,它們?cè)趫D3中的大小�����、方向已繪出(
�,根據(jù)三角形法則,它們?cè)趫D3中的大小�����、方向已繪出( 的“三角形”已被拉伸成一條直線)��。
的“三角形”已被拉伸成一條直線)��。
本題只關(guān)心各矢量的大小���,顯然:
 =
=  =
=  =
=  �����,且:
�����,且: =
= 
 =
=  ����,
����, = 2
= 2 =
= 
所以: =
=  =
=  =
=  ,
, =
=  =
=  =
=  �。
�。
(學(xué)生活動(dòng))觀察與思考:這兩個(gè)加速度是否相等,勻速率圓周運(yùn)動(dòng)是不是勻變速運(yùn)動(dòng)�?
答:否;不是��。
3�、乘法
矢量的乘法有兩種:叉乘和點(diǎn)乘,和代數(shù)的乘法有著質(zhì)的不同��。
⑴ 叉乘
表達(dá): ×
× =
= 
名詞: 稱“矢量的叉積”�,它是一個(gè)新的矢量。
稱“矢量的叉積”�,它是一個(gè)新的矢量。
叉積的大�����。篶 = absinα,其中α為 和
和 的夾角��。意義:
的夾角��。意義: 的大小對(duì)應(yīng)由
的大小對(duì)應(yīng)由 和
和 作成的平行四邊形的面積��。
作成的平行四邊形的面積��。
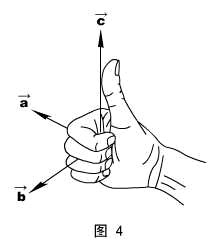
叉積的方向:垂直 和
和 確定的平面����,并由右手螺旋定則確定方向,如圖4所示。
確定的平面����,并由右手螺旋定則確定方向,如圖4所示。
顯然��, ×
× ≠
≠ ×
× ����,但有:
����,但有: ×
× = -
= - ×
×
⑵ 點(diǎn)乘
表達(dá): ·
· = c
= c
名詞:c稱“矢量的點(diǎn)積”�����,它不再是一個(gè)矢量�,而是一個(gè)標(biāo)量。
點(diǎn)積的大�����。篶 = abcosα,其中α為 和
和 的夾角�����。
的夾角�����。
二��、共點(diǎn)力的合成
1�����、平行四邊形法則與矢量表達(dá)式
2、一般平行四邊形的合力與分力的求法
余弦定理(或分割成RtΔ)解合力的大小
正弦定理解方向
三�����、力的分解
1��、按效果分解
2�、按需要——正交分解
第二講 物體的平衡
一、共點(diǎn)力平衡
1���、特征:質(zhì)心無(wú)加速度����。
2����、條件:Σ = 0 ,或
= 0 ,或  = 0 �,
= 0 �, = 0
= 0
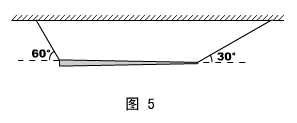
例題:如圖5所示,長(zhǎng)為L(zhǎng) �、粗細(xì)不均勻的橫桿被兩根輕繩水平懸掛,繩子與水平方向的夾角在圖上已標(biāo)示��,求橫桿的重心位置�。
解說(shuō):直接用三力共點(diǎn)的知識(shí)解題,幾何關(guān)系比較簡(jiǎn)單。
答案:距棒的左端L/4處����。
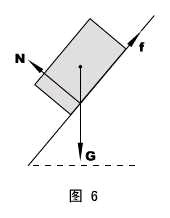
(學(xué)生活動(dòng))思考:放在斜面上的均質(zhì)長(zhǎng)方體,按實(shí)際情況分析受力�,斜面的支持力會(huì)通過(guò)長(zhǎng)方體的重心嗎?
解:將各處的支持力歸納成一個(gè)N ����,則長(zhǎng)方體受三個(gè)力(G �、f 、N)必共點(diǎn)���,由此推知�,N不可能通過(guò)長(zhǎng)方體的重心�。正確受力情形如圖6所示(通常的受力圖是將受力物體看成一個(gè)點(diǎn),這時(shí)�,N就過(guò)重心了)。
答:不會(huì)��。
二���、轉(zhuǎn)動(dòng)平衡
1�、特征:物體無(wú)轉(zhuǎn)動(dòng)加速度。
2��、條件:Σ = 0 ��,或ΣM+ =ΣM-
= 0 ��,或ΣM+ =ΣM-
如果物體靜止��,肯定會(huì)同時(shí)滿足兩種平衡����,因此用兩種思路均可解題。
3�、非共點(diǎn)力的合成
大小和方向:遵從一條直線矢量合成法則。
作用點(diǎn):先假定一個(gè)等效作用點(diǎn)��,然后讓所有的平行力對(duì)這個(gè)作用點(diǎn)的和力矩為零����。
第三講 習(xí)題課
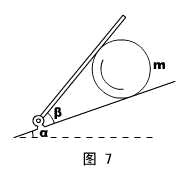
1、如圖7所示����,在固定的、傾角為α斜面上����,有一塊可以轉(zhuǎn)動(dòng)的夾板(β不定)����,夾板和斜面夾著一個(gè)質(zhì)量為m的光滑均質(zhì)球體���,試求:β取何值時(shí)���,夾板對(duì)球的彈力最小。
解說(shuō):法一��,平行四邊形動(dòng)態(tài)處理�����。
對(duì)球體進(jìn)行受力分析����,然后對(duì)平行四邊形中的矢量G和N1進(jìn)行平移�����,使它們構(gòu)成一個(gè)三角形�����,如圖8的左圖和中圖所示。
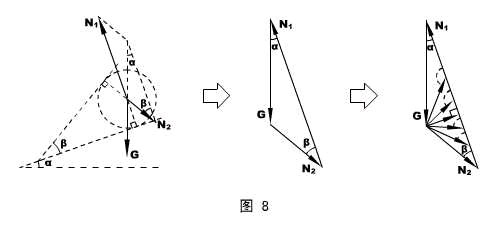
由于G的大小和方向均不變�,而N1的方向不可變,當(dāng)β增大導(dǎo)致N2的方向改變時(shí)��,N2的變化和N1的方向變化如圖8的右圖所示�。
顯然,隨著β增大��,N1單調(diào)減小��,而N2的大小先減小后增大���,當(dāng)N2垂直N1時(shí)�,N2取極小值��,且N2min = Gsinα�。
法二,函數(shù)法�。
看圖8的中間圖,對(duì)這個(gè)三角形用正弦定理��,有:
 =
=  �,即:N2 =
�,即:N2 =  ,β在0到180°之間取值�����,N2的極值討論是很容易的。
,β在0到180°之間取值�����,N2的極值討論是很容易的。
答案:當(dāng)β= 90°時(shí)�����,甲板的彈力最小����。
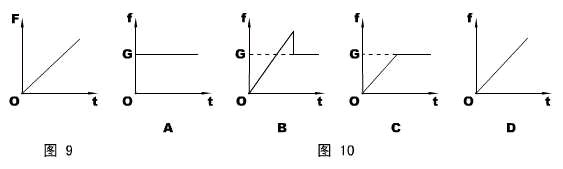
2、把一個(gè)重為G的物體用一個(gè)水平推力F壓在豎直的足夠高的墻壁上�,F(xiàn)隨時(shí)間t的變化規(guī)律如圖9所示,則在t = 0開(kāi)始物體所受的摩擦力f的變化圖線是圖10中的哪一個(gè)����?
解說(shuō):靜力學(xué)旨在解決靜態(tài)問(wèn)題和準(zhǔn)靜態(tài)過(guò)程的問(wèn)題,但本題是一個(gè)例外���。物體在豎直方向的運(yùn)動(dòng)先加速后減速,平衡方程不再適用���。如何避開(kāi)牛頓第二定律��,是本題授課時(shí)的難點(diǎn)�。
靜力學(xué)的知識(shí),本題在于區(qū)分兩種摩擦的不同判據(jù)��。
水平方向合力為零����,得:支持力N持續(xù)增大。
物體在運(yùn)動(dòng)時(shí)���,滑動(dòng)摩擦力f = μN(yùn) ����,必持續(xù)增大�����。但物體在靜止后靜摩擦力f′≡ G ��,與N沒(méi)有關(guān)系���。
對(duì)運(yùn)動(dòng)過(guò)程加以分析���,物體必有加速和減速兩個(gè)過(guò)程。據(jù)物理常識(shí)��,加速時(shí),f < G �����,而在減速時(shí)f > G �����。
答案:B ����。
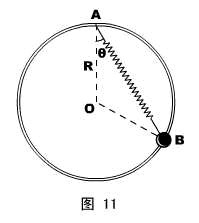
3、如圖11所示���,一個(gè)重量為G的小球套在豎直放置的�����、半徑為R的光滑大環(huán)上�,另一輕質(zhì)彈簧的勁度系數(shù)為k ���,自由長(zhǎng)度為L(zhǎng)(L<2R),一端固定在大圓環(huán)的頂點(diǎn)A �,另一端與小球相連��。環(huán)靜止平衡時(shí)位于大環(huán)上的B點(diǎn)����。試求彈簧與豎直方向的夾角θ�。
解說(shuō):平行四邊形的三個(gè)矢量總是可以平移到一個(gè)三角形中去討論,解三角形的典型思路有三種:①分割成直角三角形(或本來(lái)就是直角三角形)�����;②利用正��、余弦定理�����;③利用力學(xué)矢量三角形和某空間位置三角形相似�����。本題旨在貫徹第三種思路���。
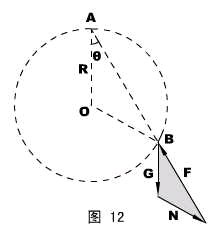
分析小球受力→矢量平移���,如圖12所示�����,其中F表示彈簧彈力�����,N表示大環(huán)的支持力�。
(學(xué)生活動(dòng))思考:支持力N可不可以沿圖12中的反方向��?(正交分解看水平方向平衡——不可以����。)
容易判斷,圖中的灰色矢量三角形和空間位置三角形ΔAOB是相似的��,所以:
 ⑴
⑴
由胡克定律:F = k( - R) ⑵
- R) ⑵
幾何關(guān)系: = 2Rcosθ ⑶
= 2Rcosθ ⑶
解以上三式即可��。

答案:arccos �����。
�����。
(學(xué)生活動(dòng))思考:若將彈簧換成勁度系數(shù)k′較大的彈簧���,其它條件不變����,則彈簧彈力怎么變��?環(huán)的支持力怎么變�����?
答:變�������;不變����。
(學(xué)生活動(dòng))反饋練習(xí):光滑半球固定在水平面上����,球心O的正上方有一定滑輪,一根輕繩跨過(guò)滑輪將一小球從圖13所示的A位置開(kāi)始緩慢拉至B位置�����。試判斷:在此過(guò)程中,繩子的拉力T和球面支持力N怎樣變化�?
解:和上題完全相同。
答:T變小����,N不變。
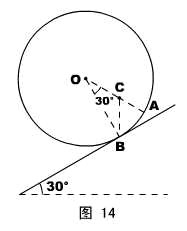
4���、如圖14所示�,一個(gè)半徑為R的非均質(zhì)圓球��,其重心不在球心O點(diǎn)���,先將它置于水平地面上�����,平衡時(shí)球面上的A點(diǎn)和地面接觸�����;再將它置于傾角為30°的粗糙斜面上�����,平衡時(shí)球面上的B點(diǎn)與斜面接觸�,已知A到B的圓心角也為30°。試求球體的重心C到球心O的距離�。
解說(shuō):練習(xí)三力共點(diǎn)的應(yīng)用。
根據(jù)在平面上的平衡����,可知重心C在OA連線上�。根據(jù)在斜面上的平衡,支持力��、重力和靜摩擦力共點(diǎn)���,可以畫(huà)出重心的具體位置�。幾何計(jì)算比較簡(jiǎn)單���。
答案: R ���。
R ���。
(學(xué)生活動(dòng))反饋練習(xí):靜摩擦足夠,將長(zhǎng)為a ����、厚為b的磚塊碼在傾角為θ的斜面上��,最多能碼多少塊����?
解:三力共點(diǎn)知識(shí)應(yīng)用���。
答: �。
�。
4�、兩根等長(zhǎng)的細(xì)線,一端拴在同一懸點(diǎn)O上�,另一端各系一個(gè)小球,兩球的質(zhì)量分別為m1和m2 �����,已知兩球間存在大小相等���、方向相反的斥力而使兩線張開(kāi)一定角度���,分別為45和30°,如圖15所示��。則m1 : m2??為多少�����?
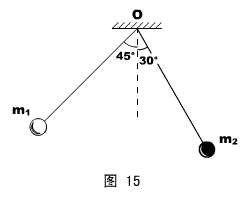
解說(shuō):本題考查正弦定理、或力矩平衡解靜力學(xué)問(wèn)題���。
對(duì)兩球進(jìn)行受力分析�,并進(jìn)行矢量平移���,如圖16所示���。
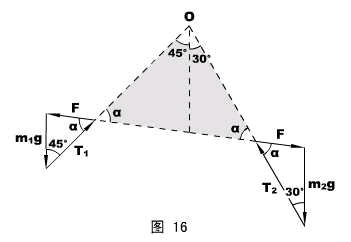
首先注意�����,圖16中的灰色三角形是等腰三角形�����,兩底角相等�,設(shè)為α。
而且����,兩球相互作用的斥力方向相反���,大小相等,可用同一字母表示��,設(shè)為F �。
對(duì)左邊的矢量三角形用正弦定理,有:
 =
=  ①
①
同理����,對(duì)右邊的矢量三角形,有: =
=  ②
②
解①②兩式即可�。
答案:1 : 。
。
(學(xué)生活動(dòng))思考:解本題是否還有其它的方法�?
答:有——將模型看成用輕桿連成的兩小球,而將O點(diǎn)看成轉(zhuǎn)軸����,兩球的重力對(duì)O的力矩必然是平衡的。這種方法更直接�、簡(jiǎn)便。
應(yīng)用:若原題中繩長(zhǎng)不等�����,而是l1 :l2 = 3 :2 ,其它條件不變����,m1與m2的比值又將是多少?
解:此時(shí)用共點(diǎn)力平衡更加復(fù)雜(多一個(gè)正弦定理方程)�����,而用力矩平衡則幾乎和“思考”完全相同��。
答:2 :3 ����。
����。
5、如圖17所示�����,一個(gè)半徑為R的均質(zhì)金屬球上固定著一根長(zhǎng)為L(zhǎng)的輕質(zhì)細(xì)桿�,細(xì)桿的左端用鉸鏈與墻壁相連�,球下邊墊上一塊木板后,細(xì)桿恰好水平����,而木板下面是光滑的水平面。由于金屬球和木板之間有摩擦(已知摩擦因素為μ)�����,所以要將木板從球下面向右抽出時(shí),至少需要大小為F的水平拉力��。試問(wèn):現(xiàn)要將木板繼續(xù)向左插進(jìn)一些���,至少需要多大的水平推力�����?
解說(shuō):這是一個(gè)典型的力矩平衡的例題���。
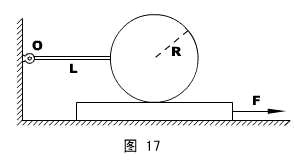
以球和桿為對(duì)象,研究其對(duì)轉(zhuǎn)軸O的轉(zhuǎn)動(dòng)平衡����,設(shè)木板拉出時(shí)給球體的摩擦力為f ,支持力為N �����,重力為G ��,力矩平衡方程為:
f R + N(R + L)= G(R + L) ①
球和板已相對(duì)滑動(dòng),故:f = μN(yùn) ②
解①②可得:f = 
再看木板的平衡�����,F(xiàn) = f ���。
同理����,木板插進(jìn)去時(shí)��,球體和木板之間的摩擦f′=  = F′����。
= F′����。
答案: 。
。
第四講 摩擦角及其它
一����、摩擦角
1、全反力:接觸面給物體的摩擦力與支持力的合力稱全反力����,一般用R表示�,亦稱接觸反力。
2、摩擦角:全反力與支持力的最大夾角稱摩擦角���,一般用φm表示����。
此時(shí)����,要么物體已經(jīng)滑動(dòng),必有:φm = arctgμ(μ為動(dòng)摩擦因素)���,稱動(dòng)摩擦力角�����;要么物體達(dá)到最大運(yùn)動(dòng)趨勢(shì)���,必有:φms = arctgμs(μs為靜摩擦因素),稱靜摩擦角��。通常處理為φm = φms �����。
3、引入全反力和摩擦角的意義:使分析處理物體受力時(shí)更方便��、更簡(jiǎn)捷�。
二、隔離法與整體法
1���、隔離法:當(dāng)物體對(duì)象有兩個(gè)或兩個(gè)以上時(shí)�,有必要各個(gè)擊破�,逐個(gè)講每個(gè)個(gè)體隔離開(kāi)來(lái)分析處理,稱隔離法���。
在處理各隔離方程之間的聯(lián)系時(shí)�,應(yīng)注意相互作用力的大小和方向關(guān)系�����。
2�����、整體法:當(dāng)各個(gè)體均處于平衡狀態(tài)時(shí)��,我們可以不顧個(gè)體的差異而講多個(gè)對(duì)象看成一個(gè)整體進(jìn)行分析處理����,稱整體法。
應(yīng)用整體法時(shí)應(yīng)注意“系統(tǒng)”�����、“內(nèi)力”和“外力”的涵義�����。
三��、應(yīng)用
1�、物體放在水平面上,用與水平方向成30°的力拉物體時(shí)����,物體勻速前進(jìn)。若此力大小不變�,改為沿水平方向拉物體,物體仍能勻速前進(jìn)�,求物體與水平面之間的動(dòng)摩擦因素μ。
解說(shuō):這是一個(gè)能顯示摩擦角解題優(yōu)越性的題目�������?梢酝ㄟ^(guò)不同解法的比較讓學(xué)生留下深刻印象�����。
法一����,正交分解�。(學(xué)生分析受力→列方程→得結(jié)果。)
法二��,用摩擦角解題�。
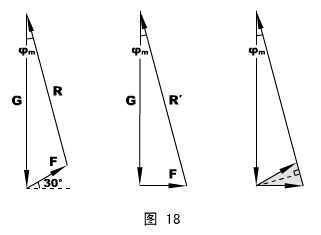
引進(jìn)全反力R ,對(duì)物體兩個(gè)平衡狀態(tài)進(jìn)行受力分析�,再進(jìn)行矢量平移,得到圖18中的左圖和中間圖(注意:重力G是不變的��,而全反力R的方向不變����、F的大小不變),φm指摩擦角�����。
再將兩圖重疊成圖18的右圖。由于灰色的三角形是一個(gè)頂角為30°的等腰三角形����,其頂角的角平分線必垂直底邊……故有:φm = 15°��。
最后��,μ= tgφm ����。
答案:0.268 。
(學(xué)生活動(dòng))思考:如果F的大小是可以選擇的��,那么能維持物體勻速前進(jìn)的最小F值是多少���?
解:見(jiàn)圖18���,右圖中虛線的長(zhǎng)度即Fmin ,所以��,F(xiàn)min = Gsinφm ���。
答:Gsin15°(其中G為物體的重量)����。
2、如圖19所示����,質(zhì)量m = 5kg的物體置于一粗糙斜面上,并用一平行斜面的��、大小F = 30N的推力推物體��,使物體能夠沿斜面向上勻速運(yùn)動(dòng)��,而斜面體始終靜止����。已知斜面的質(zhì)量M = 10kg ,傾角為30°����,重力加速度g = 10m/s2 ,求地面對(duì)斜面體的摩擦力大小����。
解說(shuō):
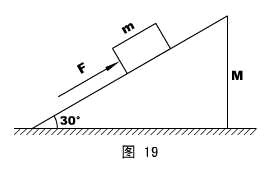
本題旨在顯示整體法的解題的優(yōu)越性。
法一,隔離法����。簡(jiǎn)要介紹……
法二,整體法��。注意��,滑塊和斜面隨有相對(duì)運(yùn)動(dòng)��,但從平衡的角度看�����,它們是完全等價(jià)的��,可以看成一個(gè)整體�����。
做整體的受力分析時(shí)�����,內(nèi)力不加考慮��。受力分析比較簡(jiǎn)單����,列水平方向平衡方程很容易解地面摩擦力。
答案:26.0N �。
(學(xué)生活動(dòng))地面給斜面體的支持力是多少?
解:略�����。
答:135N ����。
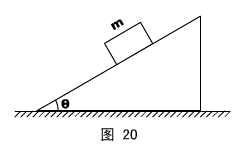
應(yīng)用:如圖20所示,一上表面粗糙的斜面體上放在光滑的水平地面上�����,斜面的傾角為θ����。另一質(zhì)量為m的滑塊恰好能沿斜面勻速下滑。若用一推力F作用在滑塊上��,使之能沿斜面勻速上滑�����,且要求斜面體靜止不動(dòng),就必須施加一個(gè)大小為P = 4mgsinθcosθ的水平推力作用于斜面體��。使?jié)M足題意的這個(gè)F的大小和方向�。
解說(shuō):這是一道難度較大的靜力學(xué)題,可以動(dòng)用一切可能的工具解題���。
法一:隔離法�����。
由第一個(gè)物理情景易得,斜面于滑塊的摩擦因素μ= tgθ
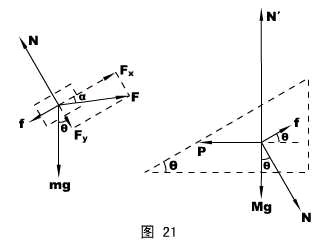
對(duì)第二個(gè)物理情景�,分別隔離滑塊和斜面體分析受力,并將F沿斜面���、垂直斜面分解成Fx和Fy ����,滑塊與斜面之間的兩對(duì)相互作用力只用兩個(gè)字母表示(N表示正壓力和彈力�����,f表示摩擦力),如圖21所示���。
對(duì)滑塊�,我們可以考查沿斜面方向和垂直斜面方向的平衡——
Fx = f + mgsinθ
Fy + mgcosθ= N
且 f = μN(yùn) = Ntgθ
綜合以上三式得到:
Fx = Fytgθ+ 2mgsinθ ①
對(duì)斜面體���,只看水平方向平衡就行了——
P = fcosθ+ Nsinθ
即:4mgsinθcosθ=μN(yùn)cosθ+ Nsinθ
代入μ值��,化簡(jiǎn)得:Fy = mgcosθ ②
②代入①可得:Fx = 3mgsinθ
最后由F = 解F的大小�����,由tgα=
解F的大小�����,由tgα=  解F的方向(設(shè)α為F和斜面的夾角)�。
解F的方向(設(shè)α為F和斜面的夾角)�。
答案:大小為F = mg ����,方向和斜面夾角α= arctg(
����,方向和斜面夾角α= arctg( )指向斜面內(nèi)部。
)指向斜面內(nèi)部。
法二:引入摩擦角和整體法觀念����。
仍然沿用“法一”中關(guān)于F的方向設(shè)置(見(jiàn)圖21中的α角)。
先看整體的水平方向平衡����,有:Fcos(θ- α) = P ⑴
再隔離滑塊�����,分析受力時(shí)引進(jìn)全反力R和摩擦角φ�����,由于簡(jiǎn)化后只有三個(gè)力(R�、mg和F)����,可以將矢量平移后構(gòu)成一個(gè)三角形,如圖22所示�����。
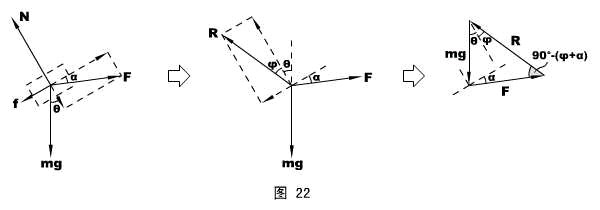
在圖22右邊的矢量三角形中���,有: =
=  =
=  ⑵
⑵
注意:φ= arctgμ= arctg(tgθ) = θ ⑶
解⑴⑵⑶式可得F和α的值。
